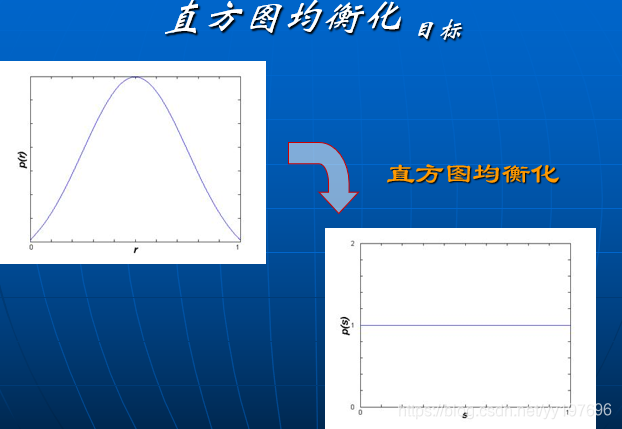
摘要 :在本篇文章中我将先对于灰度变换的一些基础的知识进行陈述。在那之后我将基于先前已经完成的基于图像处理的基础代码实现图像的灰度变换。为了可以绘制一幅直方图,我不得不在从底层实现一些基础的画笔工具,随后基于前面的灰度变换,我可以绘制出一幅图像的直方图。基于直方图可以对于图像的一些基础的特征进行分析。接着实现了一个可以进行直方图均衡化处理的函数,实现图像加强的目标。最后基于一种特殊的情况分析直方图均衡化的局限性。
(一)写在前面
前一段时间本人一直在进行Opencv有关的学习,可是在学完了一堆又一堆的函数之后,发现自己对于图像处理的知识其实本质上还是什么都不会。我相信真正图像处理一定不是仅仅调用几个函数就可以了事的,一些东西如果不自己敲一遍恐怕永远也无法懂得其真正的原理。所以我打算从最底层自己敲出一个轻量级的图像处理库出来。可能一开始我的代码并不可靠效率可能也赶不上那些开源库的效率,但是我坚信这个轮子造的一定是有意义的。
我目前已经将这个项目开源于githubLiteCV
(二)基础知识
(1)灰度变换
对于数字图像处理而言,一般包含着空间域处理和变换域处理两种形式。空间域处理方法主要是直接以图像中的像素操作为基础,它主要分为灰度变换和空间滤波两类。灰度变换是在图像的单个像素上操作,主要以对比度和阈值处理为目的。空间域处理可由下式表示:
g(x,y)=T[f(x,y)]其中f(x,y)是输入图像,g(x,y)是处理后的图像,T是在点(x,y)的领域上定义的关于f的一种算子。
为了保证经过灰度变换后的输出图像在整体的外貌上,或者更准确地说在形态学上,与输入图像保持一致,灰度变换函数必须是严格单调递增函数。在图像处理中,灰度变换主要应用于图像的对比度改善。在灰度变换中,最为常用的三类基本函数为线性函数(反转和恒等变换)、对数函数(对数和反对数变换)以及幂律函数(n次幂和n次根变换)。恒等函数是最一般的情况,其输出图像灰度等于输入图像灰度的变换。
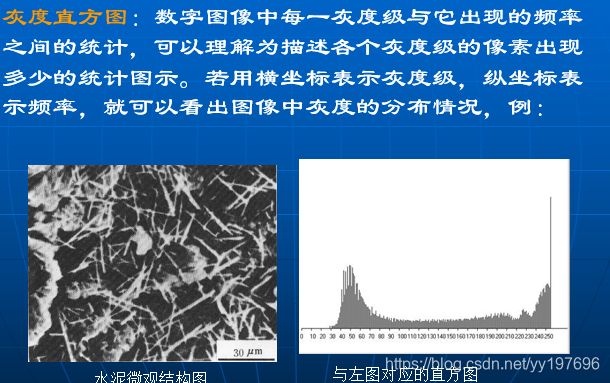
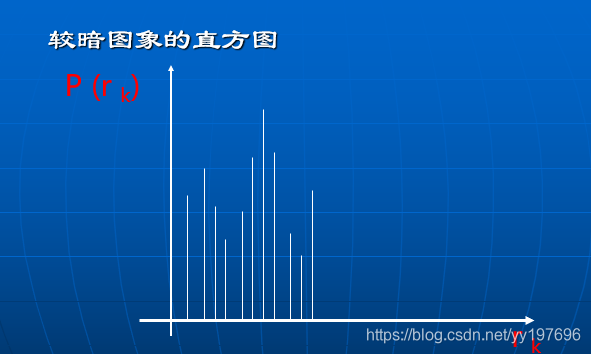
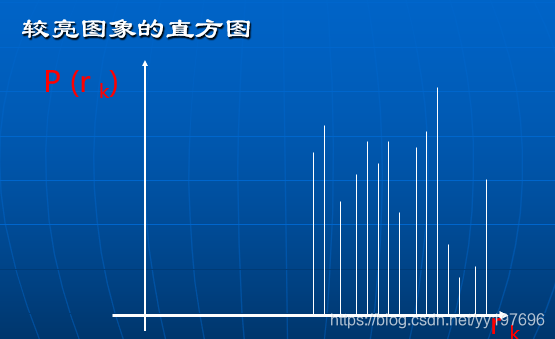
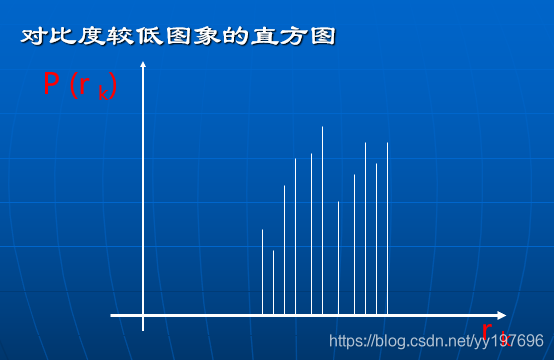
(2)灰度直方图
(3)基于灰度直方图的图像增强
(三)软件实现
(1)因为涉及到直方图绘制需要先,实现一个画笔工具箱
LI_API
void Li_Point(Li_Image* mat,LONG color,LONG x,LONG y)
{
if(x>=0&&x<mat->width&&y>0&&y<mat->height)
{
BYTE* inaddr;
inaddr=mat->at(mat,x,y);
*inaddr=(u8)((color&0x00FF0000)>>16);//B
*(inaddr+1)=(u8)((color&0x0000FF00)>>8);//G
*(inaddr+2)=(u8)(color&0x000000FF);//R
}
}
LI_API
void Li_Line(Li_Image* mat,LONG color,LONG x1, LONG y1, LONG x2, LONG y2)
{
u16 t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //计算坐标增量
delta_y=y2-y1;
uRow=x1;
uCol=y1;
if(delta_x>0)incx=1; //设置单步方向
else if(delta_x==0)incx=0;//垂直线
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if(delta_y==0)incy=0;//水平线
else{incy=-1;delta_y=-delta_y;}
if( delta_x>delta_y)distance=delta_x; //选取基本增量坐标轴
else distance=delta_y;
for(t=0;t<=distance+1;t++ )//画线输出
{
Li_Point(mat,color,uRow, uCol);
xerr+=delta_x ;
yerr+=delta_y ;
if(xerr>distance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
LI_API
void Li_Line_H(Li_Image* mat,LONG color,LONG x, LONG length)
{
Li_Line(mat,color,x,0,x,length);
}
LI_API
void Li_Line_P(Li_Image* mat,LONG color,LONG threa, LONG R)
{
float fRate = (float)(PI/180);
for(int x=1;x<mat->width;x++)
{
LONG y=(R-x*cos(threa*fRate))/sin(threa* fRate);
LONG y1=(R-(x-1)*cos(threa*fRate))/sin(threa* fRate);
if(y<mat->height&&y1<mat->height)
Li_Line(mat,color, x, y, x-1, y1);
}
}
LI_API
void Li_Circle(Li_Image* mat ,LONG color,LONG x0,LONG y0,LONG r)
{
int a,b;
int di;
a=0;b=r;
di=3-(r<<1); //判断下个点位置的标志
while(a<=b)
{
Li_Point(mat,color,x0+a, y0-b);
Li_Point(mat,color,x0+b, y0-a);
Li_Point(mat,color,x0+b, y0+a);
Li_Point(mat,color,x0+a, y0+b);
Li_Point(mat,color,x0-a, y0+b);
Li_Point(mat,color,x0-b, y0+a);
Li_Point(mat,color,x0-a, y0-b);
Li_Point(mat,color,x0-b, y0-a);
a++;
//使用Bresenham算法画圆
if(di<0)di +=4*a+6;
else
{
di+=10+4*(a-b);
b--;
}
}
}
LI_API
void Li_Char(Li_Image* mat,LONG color,LONG x,LONG y,BYTE num,BYTE size)
{
u8 temp,t1,t;
y=mat->height-y;
u16 y0=y;
u8 csize=(size/8+((size%8)?1:0))*(size/2); //得到字体一个字符对应点阵集所占的字节数
num=num-' ';//得到偏移后的值(ASCII字库是从空格开始取模,所以-' '就是对应字符的字库)
for(t=0;t<csize;t++)
{
if(size==LI_FONT_12)temp=asc2_1206[num][t]; //调用1206字体
else if(size==LI_FONT_16)temp=asc2_1608[num][t]; //调用1608字体
else if(size==LI_FONT_24)temp=asc2_2412[num][t]; //调用2412字体
else if(size==LI_FONT_32)temp=asc2_3216[num][t]; //调用3216字体
else return; //没有的字库
for(t1=0;t1<8;t1++)
{
if(temp&0x80)Li_Point(mat,color,x,mat->height-y);
temp<<=1;
y++;
if(y>=mat->width)return; //超区域了
if((y-y0)==size)
{
y=y0;
x++;
if(x>=mat->height)return; //超区域了
break;
}
}
}
}
LI_API
void Li_String(Li_Image* mat,LONG color,LONG x,LONG y,LONG width,LONG height,BYTE*p,BYTE size)
{
u8 x0=x;
width+=x;
height+=y;
while((*p<='~')&&(*p>=' '))//判断是不是非法字符!
{
if(x>=width){x=x0;y+=size;}
if(y>=height)break;//退出
Li_Char(mat,color,x, y, *p ,size);
x+=size/2;
p++;
}
}上面的文件涉及到一个字体文件因为文件太大这里就不具体给出,大家可以从github中下载
(2)将彩色图片灰度化
这里直接采用了256阶的灰度值,在获取灰度图片的同时返回一个数组记录整个图片的灰度值
/**
* Y = 0.299 * R + 0.587 * G + 0.114 * B;
Y=D+E+F;
D=0.299*R;
E=0.587*G;
F=0.114*B;
*/
static short int YMap[3][256]={
{0,0,0,0,1,1,1,2,2,2,2,3,3,3,4,4,4,5,5,5,5,6,6,6,7,7,7,8,8,8,8,9,9,9,10,10,10,11,11,11,11,12,12,12,13,13,13,14,14,14,14,15,15,15,16,16,16,17,17,17,17,18,18,18,19,19,19,20,20,20,20,21,21,21,22,22,22,23,23,23,23,24,24,24,25,25,25,25,26,26,26,27,27,27,28,28,28,28,29,29,29,30,30,30,31,31,31,31,32,32,32,33,33,33,34,34,34,34,35,35,35,36,36,36,37,37,37,37,38,38,38,39,39,39,40,40,40,40,41,41,41,42,42,42,43,43,43,43,44,44,44,45,45,45,46,46,46,46,47,47,47,48,48,48,49,49,49,49,50,50,50,51,51,51,51,52,52,52,53,53,53,54,54,54,54,55,55,55,56,56,56,57,57,57,57,58,58,58,59,59,59,60,60,60,60,61,61,61,62,62,62,63,63,63,63,64,64,64,65,65,65,66,66,66,66,67,67,67,68,68,68,69,69,69,69,70,70,70,71,71,71,72,72,72,72,73,73,73,74,74,74,75,75,75,75,76},
{0,0,1,1,2,2,3,4,4,5,5,6,7,7,8,8,9,9,10,11,11,12,12,13,14,14,15,15,16,17,17,18,18,19,19,20,21,21,22,22,23,24,24,25,25,26,26,27,28,28,29,29,30,31,31,32,32,33,34,34,35,35,36,36,37,38,38,39,39,40,41,41,42,42,43,44,44,45,45,46,46,47,48,48,49,49,50,51,51,52,52,53,53,54,55,55,56,56,57,58,58,59,59,60,61,61,62,62,63,63,64,65,65,66,66,67,68,68,69,69,70,71,71,72,72,73,73,74,75,75,76,76,77,78,78,79,79,80,80,81,82,82,83,83,84,85,85,86,86,87,88,88,89,89,90,90,91,92,92,93,93,94,95,95,96,96,97,98,98,99,99,100,100,101,102,102,103,103,104,105,105,106,106,107,107,108,109,109,110,110,111,112,112,113,113,114,115,115,116,116,117,117,118,119,119,120,120,121,122,122,123,123,124,125,125,126,126,127,127,128,129,129,130,130,131,132,132,133,133,134,134,135,136,136,137,137,138,139,139,140,140,141,142,142,143,143,144,144,145,146,146,147,147,148,149,149},
{0,0,0,0,0,0,0,0,0,1,1,1,1,1,1,1,1,1,2,2,2,2,2,2,2,2,2,3,3,3,3,3,3,3,3,3,4,4,4,4,4,4,4,4,5,5,5,5,5,5,5,5,5,6,6,6,6,6,6,6,6,6,7,7,7,7,7,7,7,7,7,8,8,8,8,8,8,8,8,9,9,9,9,9,9,9,9,9,10,10,10,10,10,10,10,10,10,11,11,11,11,11,11,11,11,11,12,12,12,12,12,12,12,12,12,13,13,13,13,13,13,13,13,14,14,14,14,14,14,14,14,14,15,15,15,15,15,15,15,15,15,16,16,16,16,16,16,16,16,16,17,17,17,17,17,17,17,17,18,18,18,18,18,18,18,18,18,19,19,19,19,19,19,19,19,19,20,20,20,20,20,20,20,20,20,21,21,21,21,21,21,21,21,22,22,22,22,22,22,22,22,22,23,23,23,23,23,23,23,23,23,24,24,24,24,24,24,24,24,24,25,25,25,25,25,25,25,25,25,26,26,26,26,26,26,26,26,27,27,27,27,27,27,27,27,27,28,28,28,28,28,28,28,28,28,29}
};
/**
* U = - 0.1687 R - 0.3313 G + 0.5 B + 128
Y=D+E+F;
D=- 0.1687 R;
E=- 0.3313 G;
F= 0.5 B;
*/
static short int UMap[3][256]={
{0,-1,-1,-1,-1,-1,-2,-2,-2,-2,-2,-2,-3,-3,-3,-3,-3,-3,-4,-4,-4,-4,-4,-4,-5,-5,-5,-5,-5,-5,-6,-6,-6,-6,-6,-6,-7,-7,-7,-7,-7,-7,-8,-8,-8,-8,-8,-8,-9,-9,-9,-9,-9,-9,-10,-10,-10,-10,-10,-10,-11,-11,-11,-11,-11,-11,-12,-12,-12,-12,-12,-12,-13,-13,-13,-13,-13,-13,-14,-14,-14,-14,-14,-15,-15,-15,-15,-15,-15,-16,-16,-16,-16,-16,-16,-17,-17,-17,-17,-17,-17,-18,-18,-18,-18,-18,-18,-19,-19,-19,-19,-19,-19,-20,-20,-20,-20,-20,-20,-21,-21,-21,-21,-21,-21,-22,-22,-22,-22,-22,-22,-23,-23,-23,-23,-23,-23,-24,-24,-24,-24,-24,-24,-25,-25,-25,-25,-25,-25,-26,-26,-26,-26,-26,-26,-27,-27,-27,-27,-27,-27,-28,-28,-28,-28,-28,-29,-29,-29,-29,-29,-29,-30,-30,-30,-30,-30,-30,-31,-31,-31,-31,-31,-31,-32,-32,-32,-32,-32,-32,-33,-33,-33,-33,-33,-33,-34,-34,-34,-34,-34,-34,-35,-35,-35,-35,-35,-35,-36,-36,-36,-36,-36,-36,-37,-37,-37,-37,-37,-37,-38,-38,-38,-38,-38,-38,-39,-39,-39,-39,-39,-39,-40,-40,-40,-40,-40,-40,-41,-41,-41,-41,-41,-41,-42,-42,-42,-42,-42,-43,-43,-43,-43,-43,-43,-44},
{0,-1,-1,-1,-2,-2,-2,-3,-3,-3,-4,-4,-4,-5,-5,-5,-6,-6,-6,-7,-7,-7,-8,-8,-8,-9,-9,-9,-10,-10,-10,-11,-11,-11,-12,-12,-12,-13,-13,-13,-14,-14,-14,-15,-15,-15,-16,-16,-16,-17,-17,-17,-18,-18,-18,-19,-19,-19,-20,-20,-20,-21,-21,-21,-22,-22,-22,-23,-23,-23,-24,-24,-24,-25,-25,-25,-26,-26,-26,-27,-27,-27,-28,-28,-28,-29,-29,-29,-30,-30,-30,-31,-31,-31,-32,-32,-32,-33,-33,-33,-34,-34,-34,-35,-35,-35,-36,-36,-36,-37,-37,-37,-38,-38,-38,-39,-39,-39,-40,-40,-40,-41,-41,-41,-42,-42,-42,-43,-43,-43,-44,-44,-44,-45,-45,-45,-46,-46,-46,-47,-47,-47,-48,-48,-48,-49,-49,-49,-50,-50,-50,-51,-51,-51,-52,-52,-52,-53,-53,-53,-54,-54,-54,-55,-55,-55,-55,-56,-56,-56,-57,-57,-57,-58,-58,-58,-59,-59,-59,-60,-60,-60,-61,-61,-61,-62,-62,-62,-63,-63,-63,-64,-64,-64,-65,-65,-65,-66,-66,-66,-67,-67,-67,-68,-68,-68,-69,-69,-69,-70,-70,-70,-71,-71,-71,-72,-72,-72,-73,-73,-73,-74,-74,-74,-75,-75,-75,-76,-76,-76,-77,-77,-77,-78,-78,-78,-79,-79,-79,-80,-80,-80,-81,-81,-81,-82,-82,-82,-83,-83,-83,-84,-84,-84,-85,-85},
{0,0,1,1,2,2,3,3,4,4,5,5,6,6,7,7,8,8,9,9,10,10,11,11,12,12,13,13,14,14,15,15,16,16,17,17,18,18,19,19,20,20,21,21,22,22,23,23,24,24,25,25,26,26,27,27,28,28,29,29,30,30,31,31,32,32,33,33,34,34,35,35,36,36,37,37,38,38,39,39,40,40,41,41,42,42,43,43,44,44,45,45,46,46,47,47,48,48,49,49,50,50,51,51,52,52,53,53,54,54,55,55,56,56,57,57,58,58,59,59,60,60,61,61,62,62,63,63,64,64,65,65,66,66,67,67,68,68,69,69,70,70,71,71,72,72,73,73,74,74,75,75,76,76,77,77,78,78,79,79,80,80,81,81,82,82,83,83,84,84,85,85,86,86,87,87,88,88,89,89,90,90,91,91,92,92,93,93,94,94,95,95,96,96,97,97,98,98,99,99,100,100,101,101,102,102,103,103,104,104,105,105,106,106,107,107,108,108,109,109,110,110,111,111,112,112,113,113,114,114,115,115,116,116,117,117,118,118,119,119,120,120,121,121,122,122,123,123,124,124,125,125,126,126,127,127}
};
/**
* V = 0.5 R - 0.4187 G - 0.0813 B + 128
Y=D+E+F;
D= 0.5 R;
E=- 0.4187 G ;
F=- 0.0813 B;
*/
static short int VMap[3][256]={
{0,0,1,1,2,2,3,3,4,4,5,5,6,6,7,7,8,8,9,9,10,10,11,11,12,12,13,13,14,14,15,15,16,16,17,17,18,18,19,19,20,20,21,21,22,22,23,23,24,24,25,25,26,26,27,27,28,28,29,29,30,30,31,31,32,32,33,33,34,34,35,35,36,36,37,37,38,38,39,39,40,40,41,41,42,42,43,43,44,44,45,45,46,46,47,47,48,48,49,49,50,50,51,51,52,52,53,53,54,54,55,55,56,56,57,57,58,58,59,59,60,60,61,61,62,62,63,63,64,64,65,65,66,66,67,67,68,68,69,69,70,70,71,71,72,72,73,73,74,74,75,75,76,76,77,77,78,78,79,79,80,80,81,81,82,82,83,83,84,84,85,85,86,86,87,87,88,88,89,89,90,90,91,91,92,92,93,93,94,94,95,95,96,96,97,97,98,98,99,99,100,100,101,101,102,102,103,103,104,104,105,105,106,106,107,107,108,108,109,109,110,110,111,111,112,112,113,113,114,114,115,115,116,116,117,117,118,118,119,119,120,120,121,121,122,122,123,123,124,124,125,125,126,126,127,127},
{0,-1,-1,-2,-2,-3,-3,-3,-4,-4,-5,-5,-6,-6,-6,-7,-7,-8,-8,-8,-9,-9,-10,-10,-11,-11,-11,-12,-12,-13,-13,-13,-14,-14,-15,-15,-16,-16,-16,-17,-17,-18,-18,-19,-19,-19,-20,-20,-21,-21,-21,-22,-22,-23,-23,-24,-24,-24,-25,-25,-26,-26,-26,-27,-27,-28,-28,-29,-29,-29,-30,-30,-31,-31,-31,-32,-32,-33,-33,-34,-34,-34,-35,-35,-36,-36,-37,-37,-37,-38,-38,-39,-39,-39,-40,-40,-41,-41,-42,-42,-42,-43,-43,-44,-44,-44,-45,-45,-46,-46,-47,-47,-47,-48,-48,-49,-49,-49,-50,-50,-51,-51,-52,-52,-52,-53,-53,-54,-54,-55,-55,-55,-56,-56,-57,-57,-57,-58,-58,-59,-59,-60,-60,-60,-61,-61,-62,-62,-62,-63,-63,-64,-64,-65,-65,-65,-66,-66,-67,-67,-67,-68,-68,-69,-69,-70,-70,-70,-71,-71,-72,-72,-73,-73,-73,-74,-74,-75,-75,-75,-76,-76,-77,-77,-78,-78,-78,-79,-79,-80,-80,-80,-81,-81,-82,-82,-83,-83,-83,-84,-84,-85,-85,-85,-86,-86,-87,-87,-88,-88,-88,-89,-89,-90,-90,-91,-91,-91,-92,-92,-93,-93,-93,-94,-94,-95,-95,-96,-96,-96,-97,-97,-98,-98,-98,-99,-99,-100,-100,-101,-101,-101,-102,-102,-103,-103,-104,-104,-104,-105,-105,-106,-106,-106,-107,-107},
{0,-1,-1,-1,-1,-1,-1,-1,-1,-1,-1,-1,-1,-2,-2,-2,-2,-2,-2,-2,-2,-2,-2,-2,-2,-3,-3,-3,-3,-3,-3,-3,-3,-3,-3,-3,-3,-4,-4,-4,-4,-4,-4,-4,-4,-4,-4,-4,-4,-4,-5,-5,-5,-5,-5,-5,-5,-5,-5,-5,-5,-5,-6,-6,-6,-6,-6,-6,-6,-6,-6,-6,-6,-6,-7,-7,-7,-7,-7,-7,-7,-7,-7,-7,-7,-7,-7,-8,-8,-8,-8,-8,-8,-8,-8,-8,-8,-8,-8,-9,-9,-9,-9,-9,-9,-9,-9,-9,-9,-9,-9,-10,-10,-10,-10,-10,-10,-10,-10,-10,-10,-10,-10,-10,-11,-11,-11,-11,-11,-11,-11,-11,-11,-11,-11,-11,-12,-12,-12,-12,-12,-12,-12,-12,-12,-12,-12,-12,-13,-13,-13,-13,-13,-13,-13,-13,-13,-13,-13,-13,-14,-14,-14,-14,-14,-14,-14,-14,-14,-14,-14,-14,-14,-15,-15,-15,-15,-15,-15,-15,-15,-15,-15,-15,-15,-16,-16,-16,-16,-16,-16,-16,-16,-16,-16,-16,-16,-17,-17,-17,-17,-17,-17,-17,-17,-17,-17,-17,-17,-17,-18,-18,-18,-18,-18,-18,-18,-18,-18,-18,-18,-18,-19,-19,-19,-19,-19,-19,-19,-19,-19,-19,-19,-19,-20,-20,-20,-20,-20,-20,-20,-20,-20,-20,-20,-20,-20,-21,-21,-21,-21,-21,-21,-21,-21,-21}
};
// b = 1.164*y+2.018*u-277;
// g = 1.164*y-0.380*u-0.813*v+134;
// r = 1.164*y+1.159*v-148;
static short int BUMap[3][256]={
{0,1,2,3,4,5,6,8,9,10,11,12,13,15,16,17,18,19,20,22,23,24,25,26,27,29,30,31,32,33,34,36,37,38,39,40,41,43,44,45,46,47,48,50,51,52,53,54,55,57,58,59,60,61,62,64,65,66,67,68,69,71,72,73,74,75,76,77,79,80,81,82,83,84,86,87,88,89,90,91,93,94,95,96,97,98,100,101,102,103,104,105,107,108,109,110,111,112,114,115,116,117,118,119,121,122,123,124,125,126,128,129,130,131,132,133,135,136,137,138,139,140,142,143,144,145,146,147,149,150,151,152,153,154,155,157,158,159,160,161,162,164,165,166,167,168,169,171,172,173,174,175,176,178,179,180,181,182,183,185,186,187,188,189,190,192,193,194,195,196,197,199,200,201,202,203,204,206,207,208,209,210,211,213,214,215,216,217,218,220,221,222,223,224,225,226,228,229,230,231,232,233,235,236,237,238,239,240,242,243,244,245,246,247,249,250,251,252,253,254,256,257,258,259,260,261,263,264,265,266,267,268,270,271,272,273,274,275,277,278,279,280,281,282,284,285,286,287,288,289,291,292,293,294,295,296},
{0,2,4,6,8,10,12,14,16,18,20,22,24,26,28,30,32,34,36,38,40,42,44,46,48,50,52,54,56,58,60,62,64,66,68,70,72,74,76,78,80,82,84,86,88,90,92,94,96,98,100,102,104,106,108,110,113,115,117,119,121,123,125,127,129,131,133,135,137,139,141,143,145,147,149,151,153,155,157,159,161,163,165,167,169,171,173,175,177,179,181,183,185,187,189,191,193,195,197,199,201,203,205,207,209,211,213,215,217,219,221,224,226,228,230,232,234,236,238,240,242,244,246,248,250,252,254,256,258,260,262,264,266,268,270,272,274,276,278,280,282,284,286,288,290,292,294,296,298,300,302,304,306,308,310,312,314,316,318,320,322,324,326,328,330,332,334,337,339,341,343,345,347,349,351,353,355,357,359,361,363,365,367,369,371,373,375,377,379,381,383,385,387,389,391,393,395,397,399,401,403,405,407,409,411,413,415,417,419,421,423,425,427,429,431,433,435,437,439,441,443,445,448,450,452,454,456,458,460,462,464,466,468,470,472,474,476,478,480,482,484,486,488,490,492,494,496,498,500,502,504,506,508,510,512,514}
};
static short int GUMap[3][256]={
{0,1,2,3,4,5,6,8,9,10,11,12,13,15,16,17,18,19,20,22,23,24,25,26,27,29,30,31,32,33,34,36,37,38,39,40,41,43,44,45,46,47,48,50,51,52,53,54,55,57,58,59,60,61,62,64,65,66,67,68,69,71,72,73,74,75,76,77,79,80,81,82,83,84,86,87,88,89,90,91,93,94,95,96,97,98,100,101,102,103,104,105,107,108,109,110,111,112,114,115,116,117,118,119,121,122,123,124,125,126,128,129,130,131,132,133,135,136,137,138,139,140,142,143,144,145,146,147,149,150,151,152,153,154,155,157,158,159,160,161,162,164,165,166,167,168,169,171,172,173,174,175,176,178,179,180,181,182,183,185,186,187,188,189,190,192,193,194,195,196,197,199,200,201,202,203,204,206,207,208,209,210,211,213,214,215,216,217,218,220,221,222,223,224,225,226,228,229,230,231,232,233,235,236,237,238,239,240,242,243,244,245,246,247,249,250,251,252,253,254,256,257,258,259,260,261,263,264,265,266,267,268,270,271,272,273,274,275,277,278,279,280,281,282,284,285,286,287,288,289,291,292,293,294,295,296},
{0,0,0,1,1,1,2,2,3,3,3,4,4,4,5,5,6,6,6,7,7,7,8,8,9,9,9,10,10,11,11,11,12,12,12,13,13,14,14,14,15,15,15,16,16,17,17,17,18,18,18,19,19,20,20,20,21,21,22,22,22,23,23,23,24,24,25,25,25,26,26,26,27,27,28,28,28,29,29,30,30,30,31,31,31,32,32,33,33,33,34,34,34,35,35,36,36,36,37,37,37,38,38,39,39,39,40,40,41,41,41,42,42,42,43,43,44,44,44,45,45,45,46,46,47,47,47,48,48,49,49,49,50,50,50,51,51,52,52,52,53,53,53,54,54,55,55,55,56,56,56,57,57,58,58,58,59,59,60,60,60,61,61,61,62,62,63,63,63,64,64,64,65,65,66,66,66,67,67,67,68,68,69,69,69,70,70,71,71,71,72,72,72,73,73,74,74,74,75,75,75,76,76,77,77,77,78,78,79,79,79,80,80,80,81,81,82,82,82,83,83,83,84,84,85,85,85,86,86,86,87,87,88,88,88,89,89,90,90,90,91,91,91,92,92,93,93,93,94,94,94,95,95,96,96,96},
{0,0,1,2,3,4,4,5,6,7,8,8,9,10,11,12,13,13,14,15,16,17,17,18,19,20,21,21,22,23,24,25,26,26,27,28,29,30,30,31,32,33,34,34,35,36,37,38,39,39,40,41,42,43,43,44,45,46,47,47,48,49,50,51,52,52,53,54,55,56,56,57,58,59,60,60,61,62,63,64,65,65,66,67,68,69,69,70,71,72,73,73,74,75,76,77,78,78,79,80,81,82,82,83,84,85,86,86,87,88,89,90,91,91,92,93,94,95,95,96,97,98,99,99,100,101,102,103,104,104,105,106,107,108,108,109,110,111,112,113,113,114,115,116,117,117,118,119,120,121,121,122,123,124,125,126,126,127,128,129,130,130,131,132,133,134,134,135,136,137,138,139,139,140,141,142,143,143,144,145,146,147,147,148,149,150,151,152,152,153,154,155,156,156,157,158,159,160,160,161,162,163,164,165,165,166,167,168,169,169,170,171,172,173,173,174,175,176,177,178,178,179,180,181,182,182,183,184,185,186,186,187,188,189,190,191,191,192,193,194,195,195,196,197,198,199,199,200,201,202,203,204,204,205,206,207}
};
static short int RUMap[3][256]={
{0,1,2,3,4,5,6,8,9,10,11,12,13,15,16,17,18,19,20,22,23,24,25,26,27,29,30,31,32,33,34,36,37,38,39,40,41,43,44,45,46,47,48,50,51,52,53,54,55,57,58,59,60,61,62,64,65,66,67,68,69,71,72,73,74,75,76,77,79,80,81,82,83,84,86,87,88,89,90,91,93,94,95,96,97,98,100,101,102,103,104,105,107,108,109,110,111,112,114,115,116,117,118,119,121,122,123,124,125,126,128,129,130,131,132,133,135,136,137,138,139,140,142,143,144,145,146,147,149,150,151,152,153,154,155,157,158,159,160,161,162,164,165,166,167,168,169,171,172,173,174,175,176,178,179,180,181,182,183,185,186,187,188,189,190,192,193,194,195,196,197,199,200,201,202,203,204,206,207,208,209,210,211,213,214,215,216,217,218,220,221,222,223,224,225,226,228,229,230,231,232,233,235,236,237,238,239,240,242,243,244,245,246,247,249,250,251,252,253,254,256,257,258,259,260,261,263,264,265,266,267,268,270,271,272,273,274,275,277,278,279,280,281,282,284,285,286,287,288,289,291,292,293,294,295,296},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,1,2,3,4,5,6,8,9,10,11,12,13,15,16,17,18,19,20,22,23,24,25,26,27,28,30,31,32,33,34,35,37,38,39,40,41,42,44,45,46,47,48,49,50,52,53,54,55,56,57,59,60,61,62,63,64,66,67,68,69,70,71,73,74,75,76,77,78,79,81,82,83,84,85,86,88,89,90,91,92,93,95,96,97,98,99,100,101,103,104,105,106,107,108,110,111,112,113,114,115,117,118,119,120,121,122,124,125,126,127,128,129,130,132,133,134,135,136,137,139,140,141,142,143,144,146,147,148,149,150,151,152,154,155,156,157,158,159,161,162,163,164,165,166,168,169,170,171,172,173,174,176,177,178,179,180,181,183,184,185,186,187,188,190,191,192,193,194,195,197,198,199,200,201,202,203,205,206,207,208,209,210,212,213,214,215,216,217,219,220,221,222,223,224,225,227,228,229,230,231,232,234,235,236,237,238,239,241,242,243,244,245,246,248,249,250,251,252,253,254,256,257,258,259,260,261,263,264,265,266,267,268,270,271,272,273,274,275,276,278,279,280,281,282,283,285,286,287,288,289,290,292,293,294,295}
};
/** RGB转灰度转换关系表
* Grey = (R*1 + G*2 + B*1) >> 2
Grey= (R*2 + G*5 + B*1) >> 3
Grey= (R*4 + G*10 + B*2) >> 4
Grey = (R*9 + G*19 + B*4) >> 5
Grey = (R*19 + G*37 + B*8) >> 6
Grey= (R*38 + G*75 + B*15) >> 7
Grey= (R*76 + G*150 + B*30) >> 8
Grey = (R*153 + G*300 + B*59) >> 9
Grey = (R*306 + G*601 + B*117) >> 10
Grey = (R*612 + G*1202 + B*234) >> 11
Grey = (R*1224 + G*2405 + B*467) >> 12
Grey= (R*2449 + G*4809 + B*934) >> 13
Grey= (R*4898 + G*9618 + B*1868) >> 14
Grey = (R*9797 + G*19235 + B*3736) >> 15
Grey = (R*19595 + G*38469 + B*7472) >> 16
Grey = (R*39190 + G*76939 + B*14943) >> 17
Grey = (R*78381 + G*153878 + B*29885) >> 18
Grey =(R*156762 + G*307757 + B*59769) >> 19
Grey= (R*313524 + G*615514 + B*119538) >> 20
*
*/
//默认采用四位精度表示
//Grey= (R*4 + G*10 + B*2) >> 4
//Grey = (R*1224 + G*2405 + B*467) >> 12
//site 精确度
void Li_Arr_bgr_gray( LiArr* src,LiArr *dst,LONG width,LONG height,BYTE site)
{
int x,y;
switch (site)
{
case 0: //查表法实现灰度转换 12位
for(x=0;x<height;x++)
for(y=0;y<width;y++)
{
*((BYTE*)dst+width*x+y)=(YMap[2][*((BYTE*)src+3*width*x+3*y)]) //B
+YMap[1][(*((BYTE*)src+3*width*x+3*y+1))] //G
+YMap[0][(*((BYTE*)src+3*width*x+3*y+2))]; //R
}
break;
case 4:
for(x=0;x<height;x++)
for(y=0;y<width;y++)
{
*((BYTE*)dst+width*x+y)=(*((BYTE*)src+3*width*x+3*y)*2) //B
+(*((BYTE*)src+3*width*x+3*y+1)*10) //G
+(*((BYTE*)src+3*width*x+3*y+2)*4)>>4; //R
}
break;
case 8:
for(x=0;x<height;x++)
for(y=0;y<width;y++)
{
*((BYTE*)dst+width*x+y)=(*((BYTE*)src+3*width*x+3*y)*30) //B
+(*((BYTE*)src+3*width*x+3*y+150)*10) //G
+(*((BYTE*)src+3*width*x+3*y+2)*76)>>8; //R
}
break;
case 16:
for(x=0;x<height;x++)
for(y=0;y<width;y++)
{
*((BYTE*)dst+width*x+y)=(*((BYTE*)src+3*width*x+3*y)*7472) //B
+(*((BYTE*)src+3*width*x+3*y+150)*38469) //G
+(*((BYTE*)src+3*width*x+3*y+2)*19595)>>16; //R
}
break;
default:
break;
}
}(3)统计概率,绘制直方图
//一张灰度直方图数据表
typedef struct tagLi_Hist
{
float data[256];
}Li_Hist;
Li_Hist* Li_Create_Hist(float* data)
{
Li_Hist* hist=(Li_Hist*)malloc(sizeof(Li_Hist));
memcpy(hist->data,data,256*sizeof(float));
return hist;
}
void Li_Destroy_Hist(Li_Hist* hist)
{
free(hist);
}
/**
* @name: Li_Print_Hist
* @msg: 打印直方图
* @param {Li_Hist* hist}
* @return {*}
*/
LI_API
void Li_Print_Hist(Li_Hist* hist)
{
printf("[ ");
for(int i=0;i<256;i++)
{
printf("%f ",hist->data[i]);
}
printf(" ]");
}
/**
* @name: Li_Visual_Hist
* @msg: 直方图转化为图像
* @param {Li_Hist* hist}
* @return {Li_Image*}
*/
LI_API
Li_Image* Li_Visual_Hist(Li_Hist* hist)
{
Li_Image* img=Li_Create_Image(256,256,LI_DEP_24U,LI_BMP_888);
float max=0,div=0;
for(int i=0;i<256;i++)
{
if(hist->data[i]>max)
max=hist->data[i];
}
div=256/max;
for(int i=0;i<256;i++)
{
Li_Line_H(img,0x0000FF,i,hist->data[i]*div);
}
return img;
}
/**
* @name: Li_Get_Hist
* @msg: 绘制直方图
* @param {Li_Image* img 图像}
* @return {Li_Hist* 直方图数据}
*/
LI_API
Li_Hist* Li_Get_Hist(Li_Image* img)
{
if(img->imgdepth!=LI_DEP_8U)return NULL;
float* buffer;//存储0-255的数值出现的次数
float* result;
int length=img->width*img->height;
//将申请的地址全部初始化为0
buffer=malloc(256*sizeof(float));
result=malloc(256*sizeof(float));
memset(buffer,0,256*4);
memset(result,0,256*4);
for(int i=0;i<length;i++)
{
BYTE off=*((BYTE*)img->data+i);
buffer[off]++;
}
for(int i=0;i<256;i++)
{
result[i]=buffer[i]/length;
}
Li_Hist* hist=Li_Create_Hist(result);
return hist;
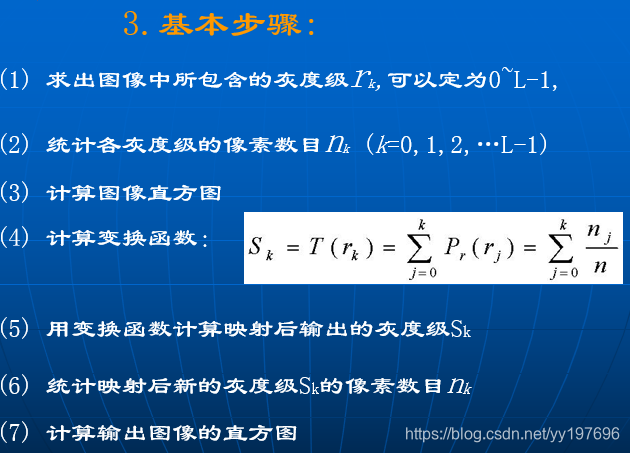
}(4)直方图均衡化算法实现
/**
* @name: Li_Normalize_Hist
* @msg: 直方图均衡化
* @param {Li_Image* img}
* @return {*}
*/
LI_API
Li_Image* Li_Normalize_Hist(Li_Image* img)
{
Li_Image* dst=Li_Copy_Image(img);
Li_Hist* Hist= Li_Get_Hist(img);
float Max,Min;
float sum[256];
BYTE out[256];//对于源灰度值产生进行新的映射表
BYTE* buf=malloc(img->width*img->height*sizeof(BYTE));
//找到原图灰度值中的最大值和最小值
//一般而言应该是0-255
for(int i=1;i<img->width*img->height;i++)
{
if(*((BYTE*)img->data+i)>Max)
{
Max=*((BYTE*)img->data+i);
}
if(*((BYTE*)img->data+i)<Min)
{
Min=*((BYTE*)img->data+i);
}
}
BYTE* inaddr;
float* data=Hist->data;
//计算累计概率和
sum[0]=*data;
for(int i=1;i<=255;i++)
{
sum[i]=sum[i-1]+*(data+i);
out[i]=(BYTE)(sum[i]*(Max-Min));//获得一张新的灰度值表
}
for(int x=0;x<dst->width;x++)
for(int y=0;y<dst->height;y++)
{
inaddr=dst->at(dst,x,y);
BYTE temp=*inaddr;
*(inaddr)=out[temp];
}
return dst;
}(四)效果测试
原图
图像加强后
我们可以明显看到图像清晰度的增强。
(五)局限性分析
这张加强显然不是万能的,在进行一幅图片的加强的时候就出现了非常极端的情况。
非常明显当原图亮度过高,或者在某一灰度值出现次数太多,就一定会出现这种失真。